|
(轉載星島日報)科技/有片| 日本硏仿人機械人駕車 車輛毋須大改裝更方便 |
 项目经理 二十五级 |
|
|
项目经理 二十五级 |
[星島綜合報道]日本東京大學的研究人員近日展示了一個名為武藏(Musashi)的仿人機械人,其設計目的是模仿人類駕駛行為,並探索自動駕駛技術的新可能性。這個創新項目並非依賴於傳統自動駕駛車輛常用的LiDAR、視覺相機和GPS等技術,而是直接讓機械人坐在駕駛座上,模仿人類駕駛的方式來控制車輛。
武藏是由東京大學的研究團隊在2019年開發的「肌肉骨骼仿人機械人」。這個機械人擁有類似人類的關節和肌肉結構,使其能夠模仿人類的自然動作。研究團隊希望通過這樣的設計,使武藏能夠像人類一樣駕駛車輛,處理各種駕駛任務。
|
|
项目经理 二十五级 |
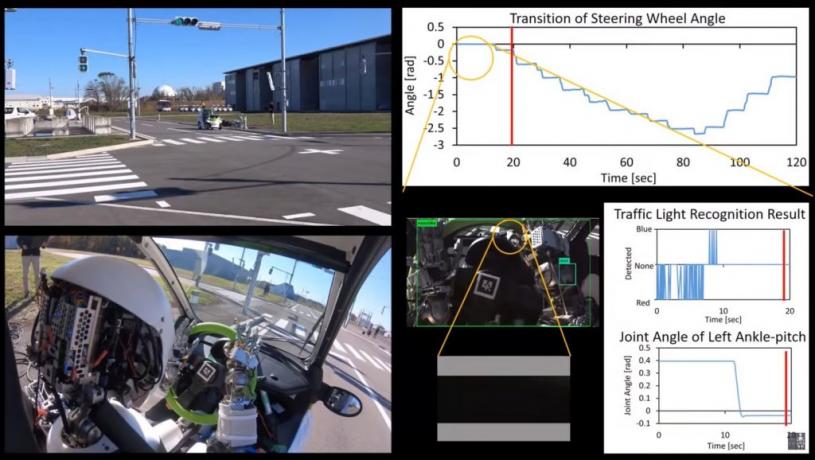
研究團隊在東京大學校區進行了實地駕駛測試。在這些測試中,武藏被安裝在一輛微型電動車內,並進行了各種駕駛操作。結果顯示,武藏能夠識別行人,對喇叭聲和交通信號有回應,這些都表明其在模仿人類駕駛行為方面具有一定的能力。然而,研究人員也發現,武藏在處理更複雜的駕駛情況,例如斜坡和急轉彎時,仍存在一些挑戰。
|
|
项目经理 二十五级 |
這種方法的優點在於車輛不需要進行大量修改。相比於需要重新設計車輛內部系統的傳統自動駕駛技術,武藏這樣的機械人駕駛員可以直接使用現有的車輛。此外,機械人駕駛員在行程之間還可以執行其他任務,例如快遞、巡邏甚至作為汽車安全測試假人。
武藏項目的成功不僅可以推動自動駕駛技術的進一步發展,還有望在其他領域產生廣泛影響。例如,在物流行業,仿人機械人駕駛員可以取代人類駕駛員,減少勞動成本並提高效率。在安全測試中,這樣的機械人可以提供更為準確和可控的測試數據,進一步提升車輛安全性。
|
|
项目经理 二十五级 |
|
|
项目经理 二十五级 |
|
|
项目经理 二十五级 |
|
|
项目经理 二十五级 |
儘管武藏在某些方面展示了其潛力,但要達到全面實用化還有很長的路要走。目前,武藏在應對複雜路況和長時間駕駛方面還存在局限,這需要進一步的技術改進。此外,機械人的感知和決策能力也需要大幅提升,以應對現實生活中的多變情況。
研究團隊計劃通過更多的實地測試和技術改進來克服這些挑戰。他們希望能夠在未來幾年內,使武藏具備更強的駕駛能力,並能夠在更廣泛的應用場景中發揮作用。
圖片:Kento Kawaharazuka et al
T10
|
|
项目经理 二十五级 |
|