|
【單片機實際應用】開機時在MySQL數據庫中自動記錄開機時間和室內溫度(由DS18B20通過串口提供) |
 一派护法 十九级 |
最終效果: 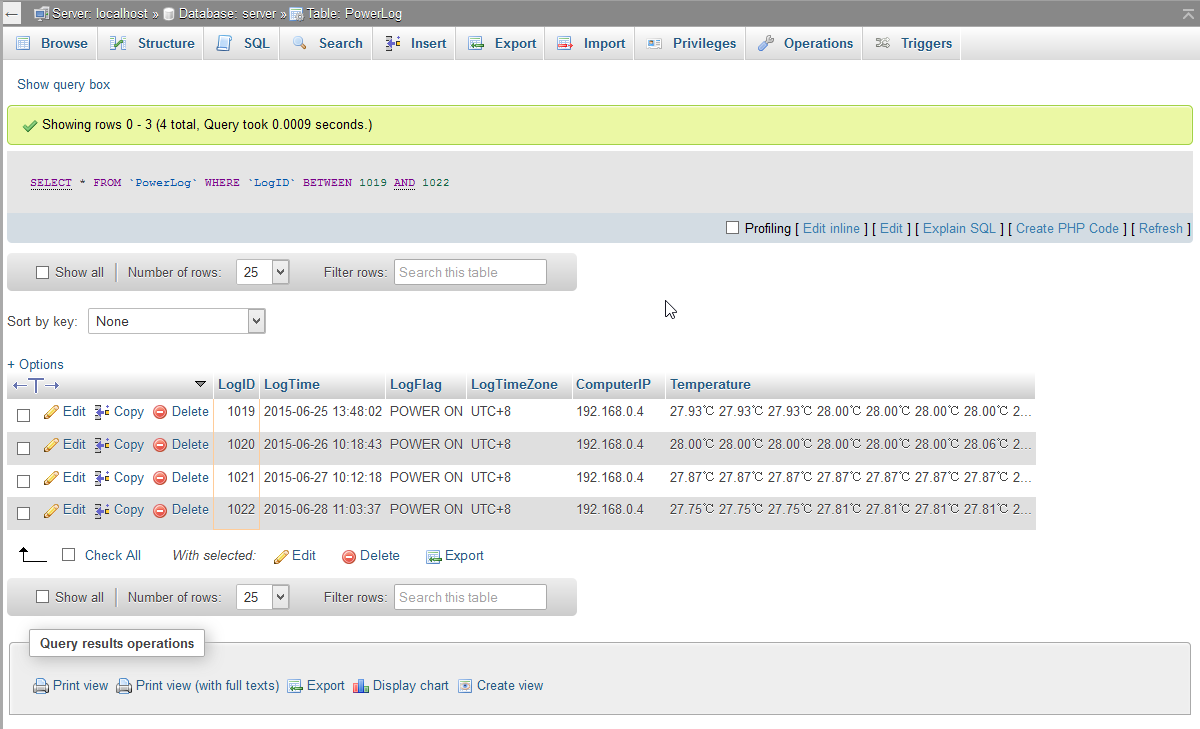 |
|
一派护法 十九级 |
数据表結構圖: 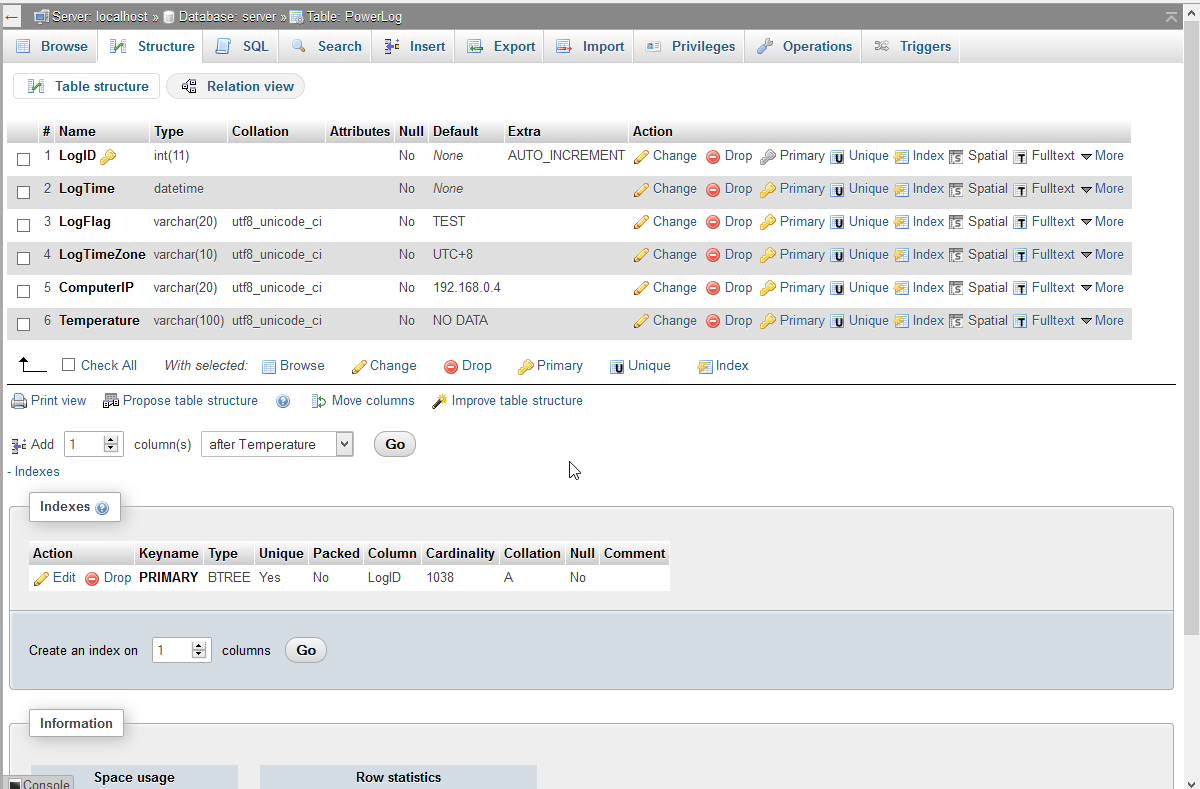 |
|
一派护法 十九级 |
數據表結構:
CREATE TABLE IF NOT EXISTS `PowerLog` (
`LogID` int(11) NOT NULL,
`LogTime` datetime NOT NULL,
`LogFlag` varchar(20) COLLATE utf8_unicode_ci NOT NULL DEFAULT 'TEST',
`LogTimeZone` varchar(10) COLLATE utf8_unicode_ci NOT NULL DEFAULT 'UTC+8',
`ComputerIP` varchar(20) COLLATE utf8_unicode_ci NOT NULL DEFAULT '192.168.0.4',
`Temperature` varchar(100) COLLATE utf8_unicode_ci NOT NULL DEFAULT 'NO DATA'
) ENGINE=InnoDB DEFAULT CHARSET=utf8 COLLATE=utf8_unicode_ci;
|
|
一派护法 十九级 |
我使用的操作系統:Fedora Linux 22
單片機型號:AVR ATMega16
|
|
一派护法 十九级 |
單片機所用晶振:7.3728MHz
串口線:USB轉串口線(設備地址:/dev/ttyUSB0)
|
|
一派护法 十九级 |
下面公佈程序源代碼。
【單片機部分】
[文件列表]
delay.c
delay.h
DS18B20.c
DS18B20.h
IR.c
IR.h
pce.c
UART.c
UART.h
|
|
一派护法 十九级 |
[delay.c]
#include "delay.h"
//延时n毫秒
void delay(unsigned int n)
{
unsigned int i;
while (n--)
for (i=0;i<1140;i++); //1ms基准延时
}
void delay_us(unsigned int n)
{
if (n==0)
return;
while (--n);
}
//延时0.5ms
void delay500us(void)
{
unsigned int i;
for (i=0;i<570;i++); //1140*0.5=570
}
//延迟0.56ms
void delay560us(void)
{
unsigned int i;
for (i=0;i<638;i++); //1140*0.56=638.4
}
|
|
一派护法 十九级 |
[delay.h]
void delay(unsigned int n);
void delay_us(unsigned int n);
void delay500us(void);
void delay560us(void);
|
|
一派护法 十九级 |
[DS18B20.c]
#include <iom16v.h>
#include <macros.h>
#include "delay.h"
#include "DS18B20.h"
unsigned char DSFlags=0xff;
unsigned char DSTN,DSTD;
void DS18B20_Init(void)
{
DQ_OUT;
DQ_1;
delay_us(6);
DQ_0;
delay_us(600);
DQ_1;
delay_us(120);
if (DQ)
DSFlags|=BIT(DSERR);
else
DSFlags&=~BIT(DSERR);
delay_us(620);
}
void DS18B20_Read(unsigned char* dat)
{
unsigned char i;
for (i=0;i<8;i++)
{
DQ_OUT;
DQ_1;
delay_us(2);
DQ_0;
delay_us(4);
DQ_1;
delay_us(6);
*dat>>=1;
if (DQ)
*dat|=0x80;
else
*dat&=0x7f;
delay_us(60);
}
}
void DS18B20_Write(unsigned char dat)
{
unsigned char i;
for (i=0;i<8;i++)
{
DQ_OUT;
DQ_1;
delay_us(2);
DQ_0;
if (dat&0x01)
DQ_IN;
else
DQ_OUT;
delay_us(30);
DQ_1;
delay_us(3);
dat>>=1;
}
delay_us(10);
}
void DS18B20_ReadyReadTemp(void)
{
DS18B20_Init();
DS18B20_Write(0xcc);
DS18B20_Write(0x44);
delay_us(20);
DS18B20_Init();
DS18B20_Write(0xcc);
DS18B20_Write(0xbe);
}
void DS18B20_Measure(void)
{
unsigned char tl,th,tltemp;
DS18B20_ReadyReadTemp();
DS18B20_Read(&tl);
DS18B20_Read(&th);
if ((th&0xf8)!=0x00)
{
DSFlags|=BIT(DSNEG);
tl=~tl;
th=~th;
tltemp=tl+1;
tl=tltemp;
if (tltemp>=255)
th++;
}
else
DSFlags&=~BIT(DSNEG);
DSTN=th*16+tl/16;
DSTD=(tl&0x0f)*625/100; //*6.25
}
|
|
一派护法 十九级 |
[DS18B20.h]
#define DSNEG 4
#define DSERR 6
#define DQ (PINB&BIT(1))
#define DQ_0 PORTB&=~BIT(1)
#define DQ_1 PORTB|=BIT(1)
#define DQ_IN DDRB&=~BIT(1) //write
#define DQ_OUT DDRB|=BIT(1) //read
extern unsigned char DSFlags;
extern unsigned char DSTN;
extern unsigned char DSTD;
void DS18B20_Init(void);
void DS18B20_Read(unsigned char* dat);
void DS18B20_Write(unsigned char dat);
void DS18B20_ReadyReadTemp(void);
void DS18B20_Measure(void);
|
|
一派护法 十九级 |
[IR.c]
#include <iom16v.h>
#include <macros.h>
#include "delay.h"
#include "UART.h"
#include "IR.h"
unsigned int hightime,lowtime;
unsigned char tlow;
unsigned char IRCode[4];
unsigned char IRDataBuffer[8];
unsigned int IRDataLength=0;
unsigned int IRStrID=0;
void IR_Init(void)
{
SEI();
IR_INT_ON;
IR_OFF;
MCUCR=0x02; //外中断0下降沿触发
TCCR1A=0x00;
TCCR1B=0x02; //定时器1设为8分频,也就相当于51单片机接12M晶振
}
//键码引导码
void IR_KeyCodeBegin(void)
{
IR_ON;
delay(9); //9ms高电平
IR_OFF;
delay(4); //4.5ms低电平
delay500us();
}
//数据引导码
void IR_DataBegin(void)
{
IR_ON;
delay(3);
IR_OFF;
delay(1);
}
//发送0
void IR_Send0(void)
{
IR_ON;
delay560us();
IR_OFF;
delay560us();
}
//发送1
void IR_Send1(void)
{
IR_ON;
delay560us();
IR_OFF;
delay560us();
delay560us();
delay560us();
}
//发送尾码,使接收端能确定最后一位是0还是1
void IR_Stop(void)
{
IR_ON;
delay560us();
IR_OFF;
}
//发送一个字节
void IR_SendByte(unsigned char Data)
{
unsigned char i;
for (i=0;i<8;i++)
{
if (Data&BIT(i))
IR_Send1();
else
IR_Send0();
}
}
//发送一个字符串
void IR_SendString(char* pStr)
{
unsigned int i;
unsigned int len=0;
char* tp=pStr;
while (*tp!='\0')
{
len++;
tp++;
}
IR_DataBegin();
IR_SendByte(len%256);
IR_SendByte(len/256);
for (i=0;*pStr!='\0';i++)
{
if (i>5 && i%8==0)
{
IR_Stop();
delay(108);
IR_DataBegin();
}
IR_SendByte(*pStr);
pStr++;
}
IR_Stop();
}
//★发送一个完整的按键码
//usercode为用户码,16位
//keycode为键码,8位
void IR_SendKeyCode(unsigned int usercode, unsigned char keycode)
{
IR_KeyCodeBegin();
IR_SendByte(usercode/256); //用户码高8位
IR_SendByte(usercode%256); //用户码低8位
IR_SendByte(keycode); //键码
IR_SendByte(~keycode); //键码的反码
IR_Stop(); //使接收端能区分最后一位是1还是0
}
void IR_PressKey(unsigned char keycode)
{
IR_SendKeyCode(IR_USERCODE,keycode);
}
//红外接收中断
void IR_Receive(void)
{
unsigned char tmp;
unsigned char flag=0x00;
IR_INT_OFF;
IR_ReceiveBegin();
if (lowtime>2650 && lowtime<3350 && hightime>650 && hightime<1350)
{
//红外数据接收
if (IRStrID==0)
{
IR_ReceiveByte(&tmp);
IRDataLength=tmp;
IR_ReceiveByte(&tmp);
IRDataLength+=tmp*256;
flag|=BIT(7);
}
for (tmp=0;tmp<8;tmp++)
{
IR_ReceiveByte(&IRDataBuffer[tmp]);
IRStrID++;
if (IRStrID>=IRDataLength)
{
IRStrID=0;
flag|=BIT(6);
break;
}
}
//在108ms的间隔时间中趁机把数据发给电脑
if (flag&BIT(7))
{
//起始码
UART_Send(0x40);
UART_Send(0xf5);
UART_Send(IRDataLength/256);
UART_Send(IRDataLength%256);
}
for (tmp=0;tmp<8;tmp++)
UART_Send(IRDataBuffer[tmp]);
if (flag&BIT(6))
{
//终止码
UART_Send('E');
UART_Send(0x00);
}
}
else if (lowtime>9200 && lowtime<9500 && hightime>4600 && hightime<4900)
{
//红外遥控解码
IR_ReceiveByte(&IRCode[0]);
IR_ReceiveByte(&IRCode[1]);
IR_ReceiveByte(&IRCode[2]);
IR_ReceiveByte(&IRCode[3]);
UART_Send(0x40);
UART_Send(0xf1); //finish
UART_Send(IRCode[0]);
UART_Send(IRCode[1]);
UART_Send(IRCode[2]);
UART_Send(IRCode[3]);
}
else
{
//UART_Send(0x40);
//UART_Send(0x4f);
}
IR_INT_ON;
}
void IR_ReceiveBegin(void)
{
TCNT1H=0x00;
TCNT1L=0x00;
while (!IR); //给低电平计时
tlow=TCNT1L;
lowtime=TCNT1H;
lowtime=lowtime*256+tlow;
IR_CLEAR_TIMER; //定时器1清除标志位,注意是写1清零
TCNT1H=0x00;
TCNT1L=0x00;
while (IR && !IR_TIMER_OUT); //给高电平计时
tlow=TCNT1L;
hightime=TCNT1H*256+tlow;
IR_CLEAR_TIMER;
}
void IR_ReceiveByte(unsigned char* Data)
{
unsigned char i;
for (i=0;i<8;i++)
{
TCNT1H=0x00;
TCNT1L=0x00;
while (!IR); //给低电平计时
tlow=TCNT1L;
lowtime=TCNT1H;
lowtime=lowtime*256+tlow;
IR_CLEAR_TIMER;
TCNT1H=0x00;
TCNT1L=0x00;
while (IR && !IR_TIMER_OUT); //给高电平计时
tlow=TCNT1L;
hightime=TCNT1H*256+tlow;
IR_CLEAR_TIMER;
if (hightime>1150)
*Data|=BIT(i);
else
*Data&=~BIT(i);
}
}
|
|
一派护法 十九级 |
[IR.h]
#define IR (PIND&BIT(2)) //receiver
#define IR_ON PORTB|=BIT(0) //sender
#define IR_OFF PORTB&=~BIT(0)
#define IR_USERCODE 0x18e0
#define IR_INT_ON GICR|=BIT(INT0)
#define IR_INT_OFF GICR&=~BIT(INT0)
#define IR_TIMER_OUT (TIFR&BIT(TOV1))
#define IR_CLEAR_TIMER TIFR|=BIT(TOV1)
void IR_Init(void);
void IR_KeyCodeBegin(void);
void IR_DataBegin(void);
void IR_Send0(void);
void IR_Send1(void);
void IR_Stop(void);
void IR_SendByte(unsigned char Data);
void IR_SendString(char* pStr);
void IR_SendKeyCode(unsigned int usercode, unsigned char keycode);
void IR_PressKey(unsigned char keycode);
#pragma interrupt_handler IR_Receive:iv_INT0;
void IR_Receive(void);
void IR_ReceiveBegin(void);
void IR_ReceiveByte(unsigned char* Data);
|
|
一派护法 十九级 |
[pce.c]
#include <iom16v.h>
#include <macros.h>
#include "delay.h"
#include "IR.h"
#include "UART.h"
#include "DS18B20.h"
void UART_Execute(void)
{
switch (UART_Buffer[0])
{
case 0x80:
//发送测试信息
UART_SendString("****************\n");
UART_SendString("It works. -- PCE\n");
UART_SendString(" -- By Octpus\n");
UART_SendString("**********************\n");
UART_ClearBuffer();
break;
case 0x81:
switch (UART_Buffer[1])
{
case 0xf0:
//反码查询
if (UART_Pos>=3)
{
UART_Send(UART_Buffer[0]);
UART_Send(UART_Buffer[1]);
UART_Send(~UART_Buffer[1]);
UART_ClearBuffer();
}
break;
default:
if (UART_Pos>=2)
UART_ThrowError();
break;
}
break;
case 0x82:
//测试红外遥控(适用于12864液晶显示)
if (UART_Pos>=2)
{
if (UART_Buffer[1]==0x40)
IR_SendString("****************It works. -- PCE -- By Octpus&&&&简体中文^^$$$");
else if (UART_Buffer[1]==0x20)
IR_SendString("Yes");
else
IR_PressKey(0x00);
UART_Send(0xa5);
UART_ClearBuffer();
}
break;
case 0x83:
//读取温度
DS18B20_Measure();
UART_Send(DSFlags);
UART_Send(DSTN);
UART_Send(DSTD);
UART_ClearBuffer();
break;
case 0x00:
//无命令
break;
case '*':
case '#':
default:
UART_ThrowError();
break;
}
}
void main(void)
{
DDRB=0xff;
PORTB=0xff;
DDRD=0xf3; //两个外中断口设为输入
PORTD=0xff;
IR_Init();
UART_Init();
//UART_SendString("#### POWER ON ####\n");
UART_Send(0x60);
UART_Send(0x85);
DS18B20_Init();
UART_Send(DSFlags);
while (1)
{
UART_Execute();
}
}
|
|
一派护法 十九级 |
回復:13樓 那個Octopus都拼錯了。算了,反正沒什麼影響。
|
|
一派护法 十九级 |
[UART.c]
#include <iom16v.h>
#include <macros.h>
#include "UART.h"
unsigned char UART_Buffer[256]={0x00};
unsigned char UART_Pos=0;
void UART_Init(void)
{
UCSRB=0x00; //禁止发送和接收
UCSRA=0x02; //倍速异步模式USX=1
UCSRC=0x06;
UBRRL=(FOSC/8/(BAUD+1))%256; //设置波特率
UBRRH=(FOSC/8/(BAUD+1))/256;
UCSRB|=BIT(RXEN); //允许接收
UCSRB|=BIT(TXEN); //允许发送
UCSRB|=BIT(RXCIE); //允许接收中断
}
void UART_Send(unsigned char Data)
{
while (!(UCSRA&BIT(UDRE))); //如果数据寄存器不为空(0)就等待
UDR=Data;
while (!(UCSRA&BIT(TXC))); //等待数据发送完毕
UCSRA|=BIT(TXC); //清除发送标志
}
void UART_SendString(char* pStr)
{
while (*pStr!='\0')
{
UART_Send(*pStr);
pStr++;
}
}
void UART_ClearBuffer(void)
{
UART_Pos=0;
UART_Buffer[0]=0x00;
}
void UART_ThrowError(void)
{
UART_Send('?');
UART_Send(UART_Buffer[0]);
UART_ClearBuffer();
}
void UART_Receive(void)
{
while (!(UCSRA&BIT(RXC)));
UART_Buffer[UART_Pos]=UDR;
UART_Pos++;
UART_Send(UDR);
}
|
|
一派护法 十九级 |
[UART.h]
#define FOSC 7372800
#define BAUD 9600
extern unsigned char UART_Buffer[256];
extern unsigned char UART_Pos;
void UART_Init(void);
void UART_Send(unsigned char Data);
void UART_SendString(char* pStr);
void UART_ClearBuffer(void);
void UART_ThrowError(void);
#pragma interrupt_handler UART_Receive:iv_USART_RX
void UART_Receive(void);
|
|
一派护法 十九级 |
單片機端程序完畢
程序編譯用的軟件是ACC AVR(我在Linux系統下開了個XP虛擬機運行的)
|
|
一派护法 十九级 |
|
|
一派护法 十九级 |
【計算機部分】
[文件列表]
autorun.sh (設為開機自動運行)
conn.h
logview.c
Makefile
powerlog2.c
temperature.c
temperature.h
UART.c
UART.h
|
|
一派护法 十九级 |
[autorun.sh]
cd /home/octopus/Programs/powerlog
./powerlog2 on
注意:第一行要指定程序文件所在目錄!
|
|
一派护法 十九级 |
[conn.h]
#define SERVER_NAME "localhost"
#define DB_USER "root"
#define DB_PASSWD "YOUR_PASSWORD"
#define DB_NAME "server"
|
|
一派护法 十九级 |
[logview.c]
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <mysql.h>
#include "conn.h"
int main(int argc, char* argv[])
{
MYSQL conn;
mysql_init(&conn);
if (!mysql_real_connect(&conn, SERVER_NAME, DB_USER, DB_PASSWD, DB_NAME, 0, NULL, 0))
{
printf("Cannot connect to the database server.\n");
return 1;
}
mysql_query(&conn, "SET NAMES utf8");
printf("Powerlog Version 2.2\n");
FILE* file = fopen("powerlog.txt", "w");
char title[] = "ID\tTIME\n";
printf(title);
fwrite(title, strlen(title), 1, file);
char sql[] = "SELECT LogID, LogTime FROM PowerLog WHERE LogFlag = 'POWER ON' AND ComputerIP = '192.168.0.4' ORDER BY LogTime DESC";
mysql_query(&conn, sql);
MYSQL_RES* rs = mysql_store_result(&conn);
MYSQL_ROW row;
char line[100];
unsigned int i;
for (i = 0; row = mysql_fetch_row(rs); i++)
{
int id = atoi(row[0]);
char timestr[50];
sprintf(timestr, "%s", row[1]);
sprintf(line, "%d\t%s\n", id, timestr);
if (i < 20)
printf(line);
fwrite(line, strlen(line), 1, file);
}
fclose(file);
mysql_free_result(rs);
mysql_close(&conn);
return 0;
}
|
|
一派护法 十九级 |
[Makefile]
MYSQL=-I/usr/include/mysql -L/usr/lib64/mysql -lmysqlclient
powerlog2: powerlog2.o logview.o
gcc powerlog2.o temperature.o UART.o -o powerlog2 $(MYSQL)
gcc logview.o -o logview $(MYSQL)
powerlog2.o: powerlog2.c conn.h temperature.o UART.o
gcc -c powerlog2.c $(MYSQL)
temperature.o: temperature.c temperature.h
gcc -c temperature.c
UART.o: UART.c UART.h
gcc -c UART.c
logview.o: logview.c conn.h
gcc -c logview.c $(MYSQL)
clean:
rm powerlog2 *.o
|
|
一派护法 十九级 |
[powerlog2.c]
//Version: 2.2
#include <stdio.h>
#include <string.h>
#include <mysql.h>
#include <unistd.h>
#include "conn.h"
#include "temperature.h"
#include "UART.h"
int main(int argc, char* argv[])
{
char uartopened = 1;
if (UART_Open() == 0)
uartopened = 0;
MYSQL conn;
mysql_init(&conn);
if (!mysql_real_connect(&conn, SERVER_NAME, DB_USER, DB_PASSWD, DB_NAME, 0, NULL, 0))
{
printf("Cannot connect to the database server.\n");
return 1;
}
mysql_query(&conn, "SET NAMES utf8");
printf("Powerlog Version 2.2\n");
printf("Welcome\n");
char sql[200];
memset(sql, 0, sizeof(char) * 200);
char sql2[100]; // the Backup Query, which is executed when the main sql is corrupted
memset(sql2, 0, sizeof(char) * 100);
char temp[8];
int i = 10;
float f;
if (argc >= 2 && strcmp(argv[1], "on") == 0)
{
strcat(sql, "INSERT INTO PowerLog (LogTime, LogFlag, Temperature) VALUES (NOW(), 'POWER ON', TRIM('");
strcat(sql2, "INSERT INTO PowerLog (LogTime, LogFlag, Temperature) VALUES (NOW(), 'POWER ON', 'Query Error')");
}
else
{
// only for development
strcat(sql, "INSERT INTO PowerLog (LogTime, Temperature) VALUES (NOW(), TRIM('");
strcat(sql2, "INSERT INTO PowerLog (LogTime, Temperature) VALUES (NOW(), 'Query Error')");
}
if (uartopened == 1)
{
get_temperature(&f); // avoid the first possible error value
while (i--)
{
usleep(10000);
get_temperature(&f);
tempstr(&f, temp);
strcat(sql, temp);
}
}
else
strcat(sql, "UART Unavailable");
strcat(sql, "'))");
int result = mysql_query(&conn, sql);
if (result == 1)
mysql_query(&conn, sql2);
//Display the time
mysql_query(&conn, "SELECT now()");
MYSQL_RES* rs = mysql_store_result(&conn);
MYSQL_ROW row = mysql_fetch_row(rs);
char buffer[100];
sprintf(buffer, "%s", row[0]);
printf("MySQL Time: %s\n", buffer);
mysql_free_result(rs);
mysql_close(&conn);
if (uartopened == 1)
USART_Close();
return 0;
}
|
|
一派护法 十九级 |
[temperature.c]
#include <stdio.h>
#include <unistd.h>
#include "UART.h"
#define DSNEG 4
#define DSERR 6
#define BIT(n) 1<<n
char buffer[513];
void get_temperature(float* temp)
{
UART_Send(0x83);
usleep(100000);
UART_Receive(buffer);
if (buffer[1] & BIT(DSERR))
*temp = -999.99;
else
{
*temp = buffer[2] * 1.00 + buffer[3] * 0.01;
if (buffer[1] & BIT(DSNEG))
*temp = -*temp;
}
}
void tempstr(float* temp, char* str)
{
sprintf(str, "%.2f℃\t", *temp);
}
|
|
一派护法 十九级 |
[temperature.h]
void get_temperature(float* temp);
void tempstr(float* temp, char* str);
|
|
一派护法 十九级 |
[UART.c]
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h> // UNIX Standard Function Definitions
#include <fcntl.h> // File Control Definitions
#include <errno.h> // File Control Definitions
#include <termios.h> // POSIX Terminal Control Definitions
#include "UART.h"
struct termios tty;
struct termios tty_old;
int UART_id = 0;
int UART_Open(void)
{
memset(&tty, 0, sizeof(tty));
UART_id = open(UART_PORT, O_RDWR | O_NOCTTY | O_NDELAY);
if (UART_id < 0)
{
printf("Warning: Cannot open the serial port!\n");
return 0;
}
/* Error Handling */
if (tcgetattr(UART_id, &tty) != 0)
{
printf("Error: %d from tcgetattr: %s \n", errno,strerror(errno));
return 0;
}
/* Save old tty parameters */
tty_old = tty;
/* Set Baud Rate */
cfsetospeed(&tty, (speed_t)B9600);
cfsetispeed(&tty, (speed_t)B9600);
/* Setting other Port Stuff */
tty.c_cflag &= ~PARENB; // Make 8n1
tty.c_cflag &= ~CSTOPB;
tty.c_cflag &= ~CSIZE;
tty.c_cflag |= CS8;
tty.c_cflag &= ~CRTSCTS; // no flow control
tty.c_cc[VMIN] = 1; // read doesn't block
tty.c_cc[VTIME] = 5; // 0.5 second read timeout
tty.c_cflag |= CREAD | CLOCAL; // turn on READ & ignore ctrl lines
/* Make raw */
cfmakeraw(&tty);
/* Flush Port, then applies attributes */
tcflush(UART_id, TCIFLUSH);
if (tcsetattr(UART_id, TCSANOW, &tty) != 0)
{
printf("Error: %d from tcgetattr \n", errno);
return 0;
}
return UART_id;
}
void UART_Send(unsigned char Byte)
{
write(UART_id, &Byte, 1);
// It was definitely not necessary to write byte per byte, also int n_written = write( UART_id, cmd, sizeof(cmd) -1) worked fine.
}
int UART_Receive(char* buf)
{
int len = read(UART_id, buf, 512);
buf[len] = '\0';
return len;
}
void USART_Close()
{
close(UART_id);
}
|
|
一派护法 十九级 |
[UART.h]
#define UART_PORT "/dev/ttyUSB0"
int UART_Open(void);
void UART_Send(unsigned char Byte);
int UART_Receive(char* buf);
void USART_Close();
|
|
一派护法 十九级 |
單片機端程序完畢
|
|
一派护法 十九级 |
補充:PHP讀取DS18B20溫度值的示例程序
<?php
define("DSNEG", 4);
define("DSERR", 6);
function BIT($n) {
return 1 << $n;
}
function decodeTemperature($flags, $TN, $TD) {
if ($flags & BIT(DSERR)) {
$value = "Error";
} else {
$value = $TN * 1.00 + $TD * 0.01;
if ($flags & BIT(DSNEG)) {
$value = -$value;
}
}
return $value;
}
$filename = "/dev/ttyUSB0";
$fp = fopen($filename, "a+");
fwrite($fp, "\x83");
$flag = fread($fp, 1);
$data = fread($fp, 3);
printf("<b>Flag:</b> 0x%x (Useless)<br>\n", $flag);
printf("<b>Data:</b> 0x%x, 0x%x, 0x%x<br>\n", ord($data{0}), ord($data{1}), ord($data{2}));
$temperature = decodeTemperature(ord($data{0}), ord($data{1}), ord($data{2}));
echo "<b>Temperature:</b> $temperature°C";
fclose($fp);
?>
輸出:
Flag: 0x0 (Useless)
Data: 0xaf, 0x1b, 0x25
Temperature: 27.37°C
|


