【胡克引导定律】
用一弹簧连接两个铁块置于光滑冰面上,弹簧之伸缩能使两个铁块产生加速度
我们做如下实验:
在冰面的立墙处卡住(固定住)铁块甲,并用弹簧将铁块甲乙连接起来,此时铁块乙在冰面上处于自由状态
我们将弹簧压缩到一个确定长度L1后,松开弹簧,来看铁块乙因弹簧伸张获得的加速度a1
然后我们将被卡住的铁块甲换成铁块丙,来做同样的实验,发现只要弹簧被压缩到指定长度L1,铁块乙因弹簧伸张获得的加速度a1始终相同
我们继续将被卡住的铁块换成其他各种铁块,重复上述实验,仍发现:
只要弹簧被压缩到指定长度L1,铁块乙因弹簧伸张获得的加速度a1始终相同,此结果与被卡住的铁块完全无关
然后我们做下面的实验:将上述实验中弹簧被压缩到的长度改为L2,发现弹簧伸张时使得铁块乙获得的加速度变为a2,且当我们更换被卡住的铁块时,对此结果毫无影响
我们尝试修改弹簧被压缩到的长度为L3、L4、L5。。。等等,重复上述实验,发现每个弹簧长度都对应使铁块乙获得一个加速度a3、a4、a5。。。等等,每个加速度大小只和弹簧被压缩后长度有关,与被卡住的铁块无关
比较所有数据L1、L2、L3、L4、L5。。。和a1、a2、a3、a4、a5。。。发现一个规律:
如果弹簧自由伸展时原长L0,那么:
a1∝L-L1
a2∝L-L2
a3∝L-L3
a4∝L-L4
a5∝L-L5
。。。
∝为正比例符号
上述式子右侧均为弹簧被压缩后缩短的长度,我们将它记为x,则铁块乙因弹簧获得的加速度a满足:
a=Nx
其中N是一个比例常数
现在我们已知道,同一铁块在前述弹簧实验中因弹簧伸张所获得的加速度满足a=Nx关系
但不同弹簧伸张时对同一铁块产生的加速度a满足何等规律?
我们对同一个铁块更换不同弹簧后重复上述实验发现,如果给弹簧编号1,2,3。。。等,就能得到一组新公式:
a=N1x
a=N2x
a=N3x
。。。。
我们发现每个弹簧都对应了自己的一个公式,每个弹簧在自己的公式里都对应一个比例系数N,N叫做弹簧的劲度系数(请注意这里我们没有考虑不同铁块质量的影响,如果你了解力的定义式F=ma以及胡克定律的一般形式F=-kx你就会发现我们这里引导定律的N比胡克定律一般形式的k少了-m系数)
【注】这里我们介绍的是【胡克定律】的引导形式,它无需质量、力这些概念的基础。看过后文大家会发现,此引导形式定律反而可以用来定义【惯性质量】这个关键概念
【惯性质量】
在胡克引导定律中我们了解到,同一弹簧拥有确定的劲度系数N,那么这根弹簧对不同铁块产生的加速度满足何种规律?
我们已知实验弹簧的劲度系数N,现在找来一系列不同的铁块,给它们标号1,2,3。。。。
现在我们用这根弹簧对每个铁块做上述实验(将每个铁块都作为冰面上的自由铁块使用)
然后对每个铁块我们都得到一个公式:
a1=N1x
a2=N2x
a3=N3x
。。。。
对同一根弹簧来说,不同的铁块对应了不同的劲度系数N
如果我们设最初那块铁块乙为标准铁块,标号为1,那么a1=N1x这个公式就是我们原来的a=Nx
我们发现a越大,N越大
于是我们意识到有些铁块可以天然地从相同伸张条件的弹簧那里得到更大的加速度,有些铁块获得的加速度却要小些
我们可以在数学上直观得出:
a1=a1N1/N1=a2N1/N2=a3N1/N3=。。。。=anN1/Nn
我们把铁块获得加速度的能力的强弱用一个新的物理量Z来表示,称之为可加速性,定义为:
标准铁块1从标准弹簧那里获得加速度a1的能力为 可加速性Z=1
其他铁块(标号n)从标准弹簧那里获得加速度的能力为 可加速性Zn=an/a1=Nn/N1
有定义可知,任意铁块(或其他物体)的可加速性皆可通过把该物体作为自由铁块,并使用标准弹簧进行前述实验来通过公式Zn=Nn/N1测得(由于加速度a对于不同弹簧压缩量x可变,不宜方便使用,所以取不随x改变的系数N来确定Z)
物理学家考虑到与【引力质量】这个概念建立联系时,Z这个物理量的倒数m=1/Z更为方便,所以物理学上通常把 可加速性Z的倒数m=1/Z称为惯性,或称为惯性质量
由此我们知道:
m=N1/Nn
即标准铁块从标准弹簧那里获得加速的劲度系数N1与非标准物体从标准弹簧那里获得加速的劲度系数Nn之比


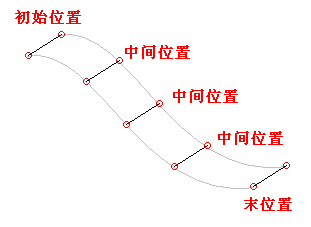
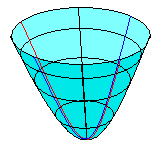 例如图中曲面上任意一点可以用经向坐标(通过该点的抛物线上的自然坐标系中的坐标)和纬向坐标(通过该点的圆线上的自然坐标系中的坐标)这两个坐标来定位
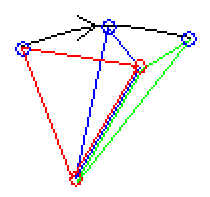
例如图中曲面上任意一点可以用经向坐标(通过该点的抛物线上的自然坐标系中的坐标)和纬向坐标(通过该点的圆线上的自然坐标系中的坐标)这两个坐标来定位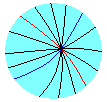 把一个我们选好的小曲面部分放大后的样子,红线和蓝线为我们最先选取的那两条线,黑线是和它们通过同一交点的曲线族(的几个代表成员)
把一个我们选好的小曲面部分放大后的样子,红线和蓝线为我们最先选取的那两条线,黑线是和它们通过同一交点的曲线族(的几个代表成员)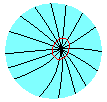 类似地我们还可以画更多的圈,并且加一条要求:
类似地我们还可以画更多的圈,并且加一条要求: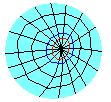 假定我们画了无数个圈,它们可以称之为同心圈族,也是一个曲线族,我们把它们称为纬向曲线族,然后我们给出一个新规定来调整纬向曲线族:
假定我们画了无数个圈,它们可以称之为同心圈族,也是一个曲线族,我们把它们称为纬向曲线族,然后我们给出一个新规定来调整纬向曲线族: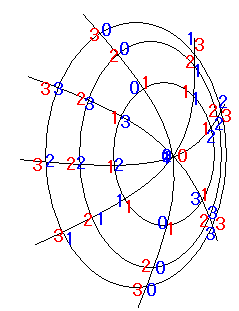 原点的经向坐标是任意的,但纬向坐标是0(确定的)
原点的经向坐标是任意的,但纬向坐标是0(确定的)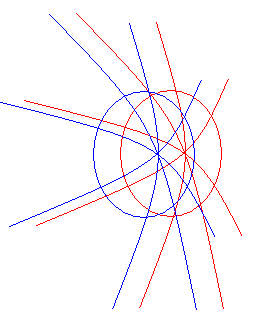 如果我们所作的移动能够保证任意同一条经向曲线(纬向曲线我们不在乎)在新旧坐标系位置上的两个”分身“没有任何交点(在我们的小区面区域内),我们称这个移动叫 类似平移(物理中的平移都是类似平移,而不是数学中严格定义的平移)
如果我们所作的移动能够保证任意同一条经向曲线(纬向曲线我们不在乎)在新旧坐标系位置上的两个”分身“没有任何交点(在我们的小区面区域内),我们称这个移动叫 类似平移(物理中的平移都是类似平移,而不是数学中严格定义的平移)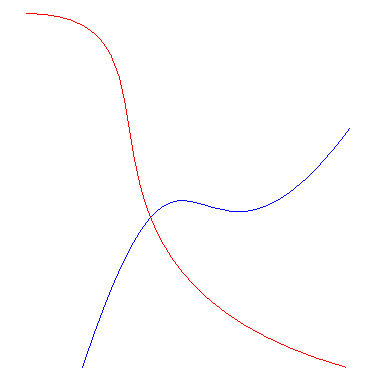 它们有一个交点,我们想要知道交点附近的平面空间结构的情况,并以此来描述两条曲线之间的位置关系(实际上是定义夹角)
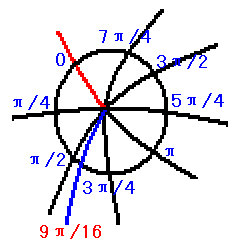
它们有一个交点,我们想要知道交点附近的平面空间结构的情况,并以此来描述两条曲线之间的位置关系(实际上是定义夹角)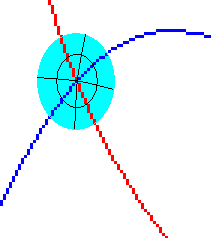 我们定义:由原点某一侧红线为起始,其经向坐标为0,任找一条纬线圈,与该经线相交的点为起点(其经坐标当然是0),令纬线圈总长度为2π来标定纬线圈的一维纬向坐标系(经坐标系),按图中方向(逆时针)令经坐标递增
我们定义:由原点某一侧红线为起始,其经向坐标为0,任找一条纬线圈,与该经线相交的点为起点(其经坐标当然是0),令纬线圈总长度为2π来标定纬线圈的一维纬向坐标系(经坐标系),按图中方向(逆时针)令经坐标递增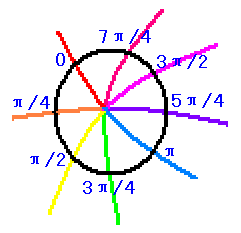 过这条纬线圈上任意一点都一定有且只有一条经线,该经线的经坐标就是纬线圈的自然坐标系中该交点的坐标
过这条纬线圈上任意一点都一定有且只有一条经线,该经线的经坐标就是纬线圈的自然坐标系中该交点的坐标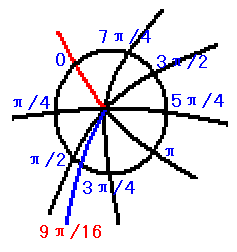 实际上,由于蓝线是曲线,而且当我们选取不同大小的纬线圈时,会与蓝线有不同交点,按同样规则来定义经纬坐标,小的纬线圈与蓝线交点对应的经坐标可能与大的纬线圈不同
实际上,由于蓝线是曲线,而且当我们选取不同大小的纬线圈时,会与蓝线有不同交点,按同样规则来定义经纬坐标,小的纬线圈与蓝线交点对应的经坐标可能与大的纬线圈不同 你懂的
你懂的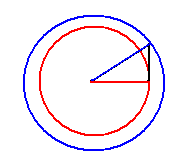 图中的红横线对应红圆的半径,蓝斜线对应蓝圆的半径,我们知道圆越大对应它的半径越长,所以蓝线必然比红线长
图中的红横线对应红圆的半径,蓝斜线对应蓝圆的半径,我们知道圆越大对应它的半径越长,所以蓝线必然比红线长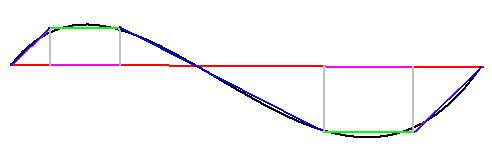 绿线和粉线的长度都是一样的,但蓝线都比对应的红线多了灰线的贡献(类似前面勾股定理的例子),所以蓝线都比红线长,因此折线总长比横直线要长,我们看到曲线的长度和折线很接近,因此可以很容易看出曲线要比横直线长
绿线和粉线的长度都是一样的,但蓝线都比对应的红线多了灰线的贡献(类似前面勾股定理的例子),所以蓝线都比红线长,因此折线总长比横直线要长,我们看到曲线的长度和折线很接近,因此可以很容易看出曲线要比横直线长 因此,在物理学(尤其是理论物理)中,只要谈到 位置 这个概念,通常说的就是位矢(位置矢量)
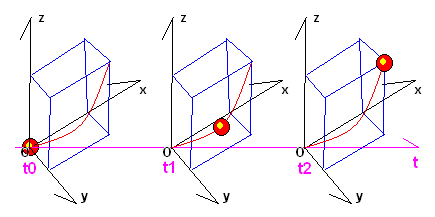
因此,在物理学(尤其是理论物理)中,只要谈到 位置 这个概念,通常说的就是位矢(位置矢量)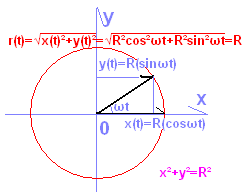 红色为轨迹方程(满足条件是位置矢量的大小恒等于圆周半径R),它是解形式的轨迹方程
红色为轨迹方程(满足条件是位置矢量的大小恒等于圆周半径R),它是解形式的轨迹方程

 任何一个坐标系都有原点(坐标为0的点)
任何一个坐标系都有原点(坐标为0的点)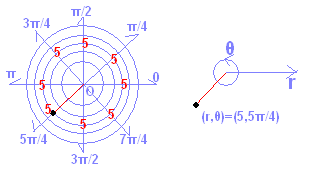
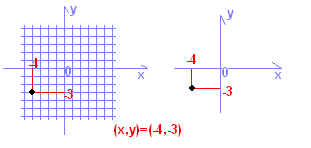
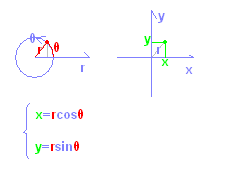 上图中,已知该点极坐标系位置(r,θ)可以通过联立的两个公式计算得到该点直角位置(x,y)
上图中,已知该点极坐标系位置(r,θ)可以通过联立的两个公式计算得到该点直角位置(x,y)