| |
|
【实验】使用定时器的外部时钟模式对多谐振荡器的性能进行评估 |
 一派護法 十九級 |
【实验时用到的程序】
#include <stm32f10x.h>
const uint8_t seg8[] = {0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8, 0x80, 0x90};
void delay(void)
{
uint16_t i;
for (i = 0; i < 20000; i++);
}
void ser_in(uint8_t data)
{
uint8_t i;
for (i = 0; i < 8; i++)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_9); // SCLK=>PB9
if (data & 0x80)
GPIO_SetBits(GPIOB, GPIO_Pin_7); // DIO=>PB7
else
GPIO_ResetBits(GPIOB, GPIO_Pin_7);
data <<= 1;
GPIO_SetBits(GPIOB, GPIO_Pin_9);
}
}
void par_out(void)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_8); // RCLK=>PB8
GPIO_SetBits(GPIOB, GPIO_Pin_8);
}
void seg_scan(void)
{
uint8_t numbuf = TIM_GetCounter(TIM2);
uint8_t i;
for (i = 0; i < 2; i++) // 只显示两位数字
{
ser_in(seg8[numbuf % 10]);
ser_in(1 << i);
par_out();
delay();
numbuf /= 10;
}
}
int main(void)
{
GPIO_InitTypeDef gpio;
TIM_ICInitTypeDef timic;
TIM_TimeBaseInitTypeDef tim;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB, ENABLE);
// 时钟输入引脚配置
gpio.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio.GPIO_Pin = GPIO_Pin_0;
GPIO_Init(GPIOA, &gpio);
// 数码管扫描管脚配置
gpio.GPIO_Mode = GPIO_Mode_Out_PP;
gpio.GPIO_Pin = GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9;
gpio.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &gpio);
// 配置定时器的计数范围
TIM_TimeBaseStructInit(&tim);
tim.TIM_CounterMode = TIM_CounterMode_Down; // 向下计数
tim.TIM_Period = 99; // 最大计数值
tim.TIM_Prescaler = 0; // 不分频
TIM_TimeBaseInit(TIM2, &tim);
// 配置定时器2的通道1
timic.TIM_Channel = TIM_Channel_1;
timic.TIM_ICFilter = 0; // 不消抖
timic.TIM_ICPolarity = TIM_ICPolarity_Rising; // 上升沿触发 (注意: 不能设为TIM_ICPolarity_BothEdge, 根本就没有双边沿检测功能)
//timic.TIM_ICPrescaler = TIM_ICPSC_DIV1; // 这个选项在外部时钟模式中无效(输入捕获模式才会用到)
timic.TIM_ICSelection = TIM_ICSelection_DirectTI; // TI1->IC1=PA0
TIM_ICInit(TIM2, &timic);
// 外部时钟模式1
TIM_SelectInputTrigger(TIM2, TIM_TS_TI1FP1); // TRGI=TI1
TIM_SelectSlaveMode(TIM2, TIM_SlaveMode_External1); // 把时钟信号设为TRGI
TIM_Cmd(TIM2, ENABLE);
while (1)
seg_scan();
}
|
|
一派護法 十九級 |
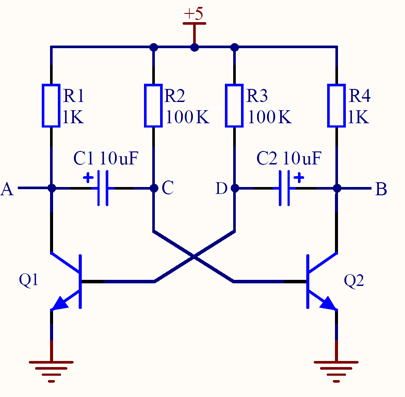
【多谐振荡器的电路配置】
充电端接200Ω电阻和一个LED灯(电阻的大小决定输出端上升沿的跳变时间)。
放电端接100kΩ电阻(电阻大小决定输出端脉冲的宽度)。
这里要注意的是,放电电阻不可以接的太大(如200kΩ),否则三极管会处于放大状态,不仅使输出的低电平电压升高(如升高到2V甚至更高,单片机端将无法正确地检测出输出电平),而且很可能使整个多谐振荡器不能正常工作,甚至无法起振。
电容器为10μF。电容器靠近LED的那一端为正极,接三极管基极的那一端为负极。
当右输出端接地时,两个LED灯都亮,用万用表测得左输出端(三极管的集电极)的电压为0.97V(输出的低电平电压)。这表明三极管导通时处于放大状态,不过这并没有什么影响。
现在悬空右输出端,将左输出端接到单片机的PA0口上(定时器2的输入通道1)。
当左LED灯熄灭时,左电容器通过充电小电阻快速充电,输出端迅速从低电平(0.97V)升高到高电平(用万用表测出来大约是3.4V,理论上是4.3V),并保持在高电平,直到右电容器放电完毕。
充电时间 = - 充电电阻大小 x 电容大小 x ln[(E - 末电压) / (E - 初电压)]
其中E为最大充电电压,由于充电时电容器和充电电阻并联在放电电阻两端,而放电电阻又和右三极管的发射结是串联的,发射结的导通电压是0.7V,因此实际上电容器最大只能充到E=5V-0.7V=4.3V
因此上升沿时间 = - 200 * 10 * 10^-6 * ln[(4.3-4.29) / (4.3-(-0.7))] (初电压是-0.7V,因为放电完毕时电容器被反向充电到了0.7V,现在充电前必须先释放掉这部分电压)
≈ 12.43ms
当左LED灯亮起时,由于左三极管导通,左电容器的正极外接电压<负极外接电压,而正极内部电压>负极内部电压(因为之前已经充好电了),所以此时电源对该电容器进行反向充电(也就是放电),先从4.3V放到0V,再充到0.7V使右三极管导通,可以看作是从-4.3V充电到0.7V。这段时间左输出端的电压一直为0.97V,输出低电平。右三极管的基极电压从负压(-4.3V)变到正压(0.7V)。
持续的时间 = - 放电电阻大小 x 电容大小 x ln[(E - 末电压) / (E - 初电压)]
= - 100 * 10^3 * 10 * 10^-6 * ln[(E - (+0.7))/(E - (-4.3))] (E=5V)
≈ 0.77s
(计算时假定的是三极管是饱和导通。因为现在三极管是处于放大状态,所以实际时间比这个时间要短。)
因此,左输出端的上升沿出现在左LED灯熄灭的瞬间(电容器充电的速度非常快),程序中的定时器2就是对上升沿进行计数。
|
|
一派護法 十九級 |
编译并下载单片机程序,实验发现,虽然在程序中没有开通道1的消抖功能,并且GPIO配置的是浮空输入,但数码管的数字显示很稳定,仅当左LED灯熄灭时才减1(向下计数)。
把左LED灯短路,计时速度明显加快,并且数码管有时减2有时减1,振荡变得不稳定。
如果把两个LED灯都短路,则数码管每次减去的数毫无规律,抖动非常厉害。
|
|
一派護法 十九級 |
以下是多谐振荡器的电路图。 本实验把充电电阻R1和R4的阻值大小改成了200Ω,同时串联了LED灯。
|
|
一派護法 十九級 |
在本次实验中,Q1、Q2采用的三极管型号是9013NPN型。
|
|
一派護法 十九級 |
库函数中有一个TIxExternalClockConfig函数可以更简单地设置外部时钟模式1:
TIM_TIxExternalClockConfig(TIM2, TIM_TIxExternalCLK1Source_TI1, TIM_ICPolarity_Rising, 0);
【示例程序】
int main(void)
{
GPIO_InitTypeDef gpio;
TIM_TimeBaseInitTypeDef tim;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB, ENABLE);
// 时钟输入引脚配置
gpio.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio.GPIO_Pin = GPIO_Pin_0;
GPIO_Init(GPIOA, &gpio);
// 数码管扫描管脚配置
gpio.GPIO_Mode = GPIO_Mode_Out_PP;
gpio.GPIO_Pin = GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9;
gpio.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &gpio);
// 配置定时器的计数范围
TIM_TimeBaseStructInit(&tim);
tim.TIM_CounterMode = TIM_CounterMode_Down; // 向下计数
tim.TIM_Period = 99; // 最大计数值
tim.TIM_Prescaler = 0; // 不分频
TIM_TimeBaseInit(TIM2, &tim);
// 外部时钟模式1
TIM_TIxExternalClockConfig(TIM2, TIM_TIxExternalCLK1Source_TI1, TIM_ICPolarity_Rising, 0);
TIM_Cmd(TIM2, ENABLE);
while (1)
seg_scan();
}
|
|
一派護法 十九級 |
TIM_ETRClockMode1Config(TIM2, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0);
这个函数也是配置的是模式1,但是使用的引脚却是ETR引脚,即TRGI=ETR。
而之前的TIM_TIxExternalClockConfig函数使用的是TI1引脚,即TRGI=TI1FP1。
定时器2的ETR引脚和TI1引脚都是PA0,但对于定时器1来说两个引脚是分开的。
|
|
一派護法 十九級 |
// 外部时钟模式2
// 使用ETR (External Trigger)引脚作为外部时钟信号
TIM_ETRClockMode2Config(TIM2, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0);
TIM_Cmd(TIM2, ENABLE);
|
|
一派護法 十九級 |
现在多谐振荡器又出现了不稳定情况:有时候数码管减的数字是2
|
|
一派護法 十九級 |
【实验2:使用STM32的PWM输入模式测量多谐振荡器的脉冲宽度】
#include <stm32f10x.h>
const uint8_t seg8[] = {0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8, 0x80, 0x90};
void delay(void)
{
uint16_t i;
for (i = 0; i < 20000; i++);
}
void ser_in(uint8_t data)
{
uint8_t i;
for (i = 0; i < 8; i++)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_9); // SCLK=>PB9
if (data & 0x80)
GPIO_SetBits(GPIOB, GPIO_Pin_7); // DIO=>PB7
else
GPIO_ResetBits(GPIOB, GPIO_Pin_7);
data <<= 1;
GPIO_SetBits(GPIOB, GPIO_Pin_9);
}
}
void par_out(void)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_8); // RCLK=>PB8
GPIO_SetBits(GPIOB, GPIO_Pin_8);
}
void seg_scan(void)
{
uint16_t numbuf;
uint8_t i;
if (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_1) == SET)
numbuf = TIM_GetCapture1(TIM2); // 按键松开时显示上次脉冲的总长度(单位: 秒)
else
numbuf = TIM_GetCapture2(TIM2); // 按键按下时显示高电平的长度(单位: 秒)
for (i = 0; i < 5; i++)
{
if (i == 4)
ser_in(seg8[numbuf % 10] & 0x7f); // 显示小数点
else
ser_in(seg8[numbuf % 10]);
ser_in(1 << i);
par_out();
delay();
numbuf /= 10;
}
}
int main(void)
{
GPIO_InitTypeDef gpio;
TIM_ICInitTypeDef timic;
TIM_TimeBaseInitTypeDef tim;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC, ENABLE);
// 时钟输入引脚配置
gpio.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio.GPIO_Pin = GPIO_Pin_0;
GPIO_Init(GPIOA, &gpio);
// 数码管扫描管脚配置
gpio.GPIO_Mode = GPIO_Mode_Out_PP;
gpio.GPIO_Pin = GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9;
gpio.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &gpio);
// 按键管脚PC1配置
gpio.GPIO_Mode = GPIO_Mode_IPU;
gpio.GPIO_Pin = GPIO_Pin_1;
GPIO_Init(GPIOC, &gpio);
// 配置定时器的计数范围
TIM_TimeBaseStructInit(&tim);
tim.TIM_CounterMode = TIM_CounterMode_Up;
tim.TIM_Period = 0xffff; // 最大计数值
tim.TIM_Prescaler = 7199; // 7200分频, 得到基准时钟0.1ms
TIM_TimeBaseInit(TIM2, &tim);
// 配置定时器2的通道1
timic.TIM_Channel = TIM_Channel_1;
timic.TIM_ICFilter = 0; // 不消抖
timic.TIM_ICPolarity = TIM_ICPolarity_Rising; // 通道1捕获上升沿
timic.TIM_ICPrescaler = TIM_ICPSC_DIV1;
timic.TIM_ICSelection = TIM_ICSelection_DirectTI; // TI1->IC1=PA0
TIM_ICInit(TIM2, &timic);
// 配置定时器2的通道2
timic.TIM_Channel = TIM_Channel_2;
timic.TIM_ICFilter = 0;
timic.TIM_ICPolarity = TIM_ICPolarity_Falling; // 通道2捕获下降沿
timic.TIM_ICPrescaler = TIM_ICPSC_DIV1;
timic.TIM_ICSelection = TIM_ICSelection_IndirectTI; // TI2->IC1=PA0
TIM_ICInit(TIM2, &timic);
TIM_SelectInputTrigger(TIM2, TIM_TS_TI1FP1); // TRGI=TI1
TIM_SelectSlaveMode(TIM2, TIM_SlaveMode_Reset); // 上升沿使定时器归0
TIM_Cmd(TIM2, ENABLE);
while (1)
seg_scan();
}
|
|
一派護法 十九級 |
几次脉冲总长度(=高电平时间+低电平时间)数据:
0.7611s
0.7593s
0.7583s
0.7596s
0.7590s
0.7595s
0.7586s
几次高电平长度数据:
0.3602s
0.3575s
0.3593s
0.3594s
0.3582s
|
|
一派護法 十九級 |
【将测量结果通过串口发送到电脑上,方便复制】
#include <stm32f10x.h>
#include <string.h>
const uint8_t seg8[] = {0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8, 0x80, 0x90};
char str[] = "Total: x.xxxxs High Level: x.xxxxs\r\n";
void delay(void)
{
uint16_t i;
for (i = 0; i < 20000; i++);
}
void ser_in(uint8_t data)
{
uint8_t i;
for (i = 0; i < 8; i++)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_9); // SCLK=>PB9
if (data & 0x80)
GPIO_SetBits(GPIOB, GPIO_Pin_7); // DIO=>PB7
else
GPIO_ResetBits(GPIOB, GPIO_Pin_7);
data <<= 1;
GPIO_SetBits(GPIOB, GPIO_Pin_9);
}
}
void par_out(void)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_8); // RCLK=>PB8
GPIO_SetBits(GPIOB, GPIO_Pin_8);
}
void seg_scan(void)
{
uint16_t numbuf;
uint8_t i;
if (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_1) == SET)
numbuf = TIM_GetCapture1(TIM2); // 按键松开时显示上次脉冲的总长度(单位: 秒)
else
numbuf = TIM_GetCapture2(TIM2); // 按键按下时显示高电平的长度(单位: 秒)
for (i = 0; i < 5; i++)
{
__disable_irq();
if (i == 4)
ser_in(seg8[numbuf % 10] & 0x7f); // 显示小数点
else
ser_in(seg8[numbuf % 10]);
ser_in(1 << i);
par_out();
__enable_irq();
delay();
numbuf /= 10;
}
}
int main(void)
{
DMA_InitTypeDef dma;
GPIO_InitTypeDef gpio;
NVIC_InitTypeDef nvic;
TIM_ICInitTypeDef timic;
TIM_TimeBaseInitTypeDef tim;
USART_InitTypeDef usart;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC | RCC_APB2Periph_USART1, ENABLE);
// 时钟输入引脚和串口接收引脚配置
gpio.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_10;
GPIO_Init(GPIOA, &gpio);
// 串口发送引脚配置
gpio.GPIO_Mode = GPIO_Mode_AF_PP;
gpio.GPIO_Pin = GPIO_Pin_9;
gpio.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &gpio);
// 数码管扫描管脚配置
gpio.GPIO_Mode = GPIO_Mode_Out_PP;
gpio.GPIO_Pin = GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9;
gpio.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &gpio);
// 按键管脚PC1配置
gpio.GPIO_Mode = GPIO_Mode_IPU;
gpio.GPIO_Pin = GPIO_Pin_1;
GPIO_Init(GPIOC, &gpio);
// 配置定时器的计数范围
TIM_TimeBaseStructInit(&tim);
tim.TIM_CounterMode = TIM_CounterMode_Up;
tim.TIM_Period = 0xffff; // 最大计数值
tim.TIM_Prescaler = 7199; // 7200分频, 得到基准时钟0.1ms
TIM_TimeBaseInit(TIM2, &tim);
// 配置定时器2的通道1
timic.TIM_Channel = TIM_Channel_1;
timic.TIM_ICFilter = 0; // 不消抖
timic.TIM_ICPolarity = TIM_ICPolarity_Rising; // 通道1捕获上升沿
timic.TIM_ICPrescaler = TIM_ICPSC_DIV1;
timic.TIM_ICSelection = TIM_ICSelection_DirectTI; // TI1->IC1=PA0
TIM_ICInit(TIM2, &timic);
// 配置定时器2的通道2
timic.TIM_Channel = TIM_Channel_2;
timic.TIM_ICFilter = 0;
timic.TIM_ICPolarity = TIM_ICPolarity_Falling; // 通道2捕获下降沿
timic.TIM_ICPrescaler = TIM_ICPSC_DIV1;
timic.TIM_ICSelection = TIM_ICSelection_IndirectTI; // TI2->IC1=PA0
TIM_ICInit(TIM2, &timic);
TIM_SelectInputTrigger(TIM2, TIM_TS_TI1FP1); // TRGI=TI1
TIM_SelectSlaveMode(TIM2, TIM_SlaveMode_Reset); // 上升沿使定时器归0
TIM_Cmd(TIM2, ENABLE);
// 配置串口
USART_StructInit(&usart);
usart.USART_BaudRate = 115200;
usart.USART_Mode = USART_Mode_Tx;
USART_Init(USART1, &usart);
USART_Cmd(USART1, ENABLE);
// 配置串口DMA
USART_DMACmd(USART1, USART_DMAReq_Tx, ENABLE);
dma.DMA_BufferSize = 0;
dma.DMA_DIR = DMA_DIR_PeripheralDST;
dma.DMA_M2M = DMA_M2M_Disable;
dma.DMA_MemoryBaseAddr = (uint32_t)str;
dma.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
dma.DMA_MemoryInc = DMA_MemoryInc_Enable;
dma.DMA_Mode = DMA_Mode_Normal;
dma.DMA_PeripheralBaseAddr = (uint32_t)&USART1->DR;
dma.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
dma.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
dma.DMA_Priority = DMA_Priority_Low;
DMA_Init(DMA1_Channel4, &dma);
// 配置定时器中断
TIM_ITConfig(TIM2, TIM_IT_Trigger, ENABLE);
nvic.NVIC_IRQChannel = TIM2_IRQn;
nvic.NVIC_IRQChannelCmd = ENABLE;
nvic.NVIC_IRQChannelPreemptionPriority = 0;
nvic.NVIC_IRQChannelSubPriority = 0;
NVIC_Init(&nvic);
while (1)
seg_scan();
}
void TIM2_IRQHandler(void)
{
uint8_t i, j;
uint16_t numbuf;
TIM_ClearITPendingBit(TIM2, TIM_IT_Trigger);
for (i = 7; i < 30; i += 21)
{
if (i == 7)
numbuf = TIM_GetCapture1(TIM2);
else
numbuf = TIM_GetCapture2(TIM2);
for (j = 5; j <= 5; j--)
{
if (j == 1)
continue;
str[i + j] = '0' + numbuf % 10;
numbuf /= 10;
}
}
DMA_Cmd(DMA1_Channel4, DISABLE);
DMA_SetCurrDataCounter(DMA1_Channel4, strlen(str));
DMA_Cmd(DMA1_Channel4, ENABLE);
}
|
|
一派護法 十九級 |
【测得的数据】
Total: 0.0519s High Level: 0.0000s
Total: 0.7598s High Level: 0.3597s
Total: 0.7676s High Level: 0.3614s
Total: 0.7684s High Level: 0.3618s
Total: 0.7688s High Level: 0.3635s
Total: 0.7653s High Level: 0.3630s
Total: 0.7654s High Level: 0.3606s
Total: 0.7639s High Level: 0.3617s
Total: 0.7643s High Level: 0.3592s
Total: 0.7602s High Level: 0.3556s
Total: 0.7624s High Level: 0.3595s
Total: 0.7605s High Level: 0.3587s
Total: 0.7571s High Level: 0.3535s
Total: 0.7599s High Level: 0.3567s
Total: 0.7605s High Level: 0.3572s
Total: 0.7566s High Level: 0.3520s
Total: 0.7593s High Level: 0.3547s
Total: 0.7553s High Level: 0.3543s
Total: 0.7537s High Level: 0.3493s
Total: 0.7555s High Level: 0.3542s
Total: 0.7562s High Level: 0.3532s
Total: 0.7601s High Level: 0.3570s
Total: 0.7526s High Level: 0.3523s
Total: 0.7596s High Level: 0.3577s
Total: 0.7576s High Level: 0.3553s
Total: 0.7571s High Level: 0.3537s
Total: 0.7537s High Level: 0.3542s
Total: 0.7585s High Level: 0.3560s
Total: 0.7562s High Level: 0.3522s
Total: 0.7548s High Level: 0.3541s
Total: 0.7539s High Level: 0.3499s
Total: 0.7534s High Level: 0.3514s
Total: 0.7565s High Level: 0.3526s
Total: 0.7538s High Level: 0.3522s
Total: 0.7582s High Level: 0.3560s
Total: 0.7521s High Level: 0.3509s
Total: 0.7551s High Level: 0.3516s
Total: 0.7515s High Level: 0.3493s
Total: 0.7538s High Level: 0.3527s
Total: 0.7498s High Level: 0.3497s
Total: 0.7565s High Level: 0.3545s
Total: 0.7529s High Level: 0.3523s
Total: 0.7493s High Level: 0.3488s
Total: 0.7500s High Level: 0.3498s
Total: 0.7569s High Level: 0.3547s
Total: 0.7521s High Level: 0.3511s
Total: 0.7496s High Level: 0.3492s
Total: 0.7502s High Level: 0.3498s
Total: 0.7572s High Level: 0.3550s
Total: 0.7522s High Level: 0.3519s
Total: 0.7551s High Level: 0.3512s
Total: 0.7495s High Level: 0.3463s
Total: 0.7535s High Level: 0.3522s
Total: 0.7517s High Level: 0.3514s
Total: 0.7499s High Level: 0.3500s
Total: 0.7503s High Level: 0.3504s
Total: 0.7543s High Level: 0.3504s
Total: 0.7543s High Level: 0.3535s
|
|
一派護法 十九級 |
【TIM2_IRQHandler函数容错处理】
// 仅当上次发送完毕后再发送新内容, 否则丢弃本次测量结果
if (DMA_GetCurrDataCounter(DMA1_Channel4) == 0)
{
DMA_Cmd(DMA1_Channel4, DISABLE);
DMA_SetCurrDataCounter(DMA1_Channel4, strlen(str));
DMA_Cmd(DMA1_Channel4, ENABLE);
}
|
|
一派護法 十九級 |
【将左LED灯短路后测得的数据】
Total: 0.2129s High Level: 0.0011s
Total: 0.0042s High Level: 0.0022s
Total: 0.0066s High Level: 0.0009s
Total: 0.4424s High Level: 0.4061s
Total: 0.4432s High Level: 0.4025s
Total: 0.0032s High Level: 0.0006s
Total: 0.4497s High Level: 0.4123s
Total: 0.4442s High Level: 0.0000s
Total: 0.0029s High Level: 0.0008s
Total: 0.4509s High Level: 0.4147s
Total: 0.4501s High Level: 0.4133s
Total: 0.0049s High Level: 0.0049s
Total: 0.4339s High Level: 0.3970s
Total: 0.4497s High Level: 0.4138s
Total: 0.4507s High Level: 0.4138s
Total: 0.4589s High Level: 0.4210s
Total: 0.4336s High Level: 0.0020s
Total: 0.0033s High Level: 0.0010s
Total: 0.4332s High Level: 0.4002s
Total: 0.0051s High Level: 0.0033s
Total: 0.4352s High Level: 0.4035s
Total: 0.0057s High Level: 0.0032s
Total: 0.4301s High Level: 0.3939s
Total: 0.4495s High Level: 0.4122s
Total: 0.4494s High Level: 0.4133s
Total: 0.4509s High Level: 0.4145s
Total: 0.4489s High Level: 0.4128s
Total: 0.4388s High Level: 0.4025s
Total: 0.4503s High Level: 0.4142s
Total: 0.4394s High Level: 0.4033s
Total: 0.4498s High Level: 0.4123s
Total: 0.4489s High Level: 0.4118s
Total: 0.4495s High Level: 0.4122s
Total: 0.4402s High Level: 0.4039s
Total: 0.4500s High Level: 0.4129s
Total: 0.4530s High Level: 0.4191s
Total: 0.4564s High Level: 0.4200s
Total: 0.4389s High Level: 0.4026s
Total: 0.4397s High Level: 0.4027s
Total: 0.4492s High Level: 0.4118s
Total: 0.4500s High Level: 0.4131s
Total: 0.4495s High Level: 0.4123s
Total: 0.4601s High Level: 0.4227s
Total: 0.4395s High Level: 0.4038s
Total: 0.4488s High Level: 0.4108s
Total: 0.4403s High Level: 0.4046s
Total: 0.4402s High Level: 0.4042s
Total: 0.4386s High Level: 0.4024s
Total: 0.4443s High Level: 0.0001s
Total: 0.0002s High Level: 0.0001s
Total: 0.4554s High Level: 0.4222s
Total: 0.0058s High Level: 0.0033s
Total: 0.4503s High Level: 0.4143s
Total: 0.4506s High Level: 0.4141s
Total: 0.4486s High Level: 0.4118s
Total: 0.4400s High Level: 0.4039s
Total: 0.4523s High Level: 0.4189s
Total: 0.0064s High Level: 0.0033s
Total: 0.4441s High Level: 0.0001s
Total: 0.0002s High Level: 0.0002s
Total: 0.4523s High Level: 0.4150s
Total: 0.4499s High Level: 0.4133s
Total: 0.4434s High Level: 0.4111s
Total: 0.0002s High Level: 0.0002s
Total: 0.4531s High Level: 0.4165s
Total: 0.4503s High Level: 0.4121s
Total: 0.4425s High Level: 0.0000s
Total: 0.0032s High Level: 0.0008s
Total: 0.4437s High Level: 0.0001s
Total: 0.0030s High Level: 0.0009s
Total: 0.4507s High Level: 0.4140s
Total: 0.4434s High Level: 0.0001s
Total: 0.0001s High Level: 0.0000s
Total: 0.4417s High Level: 0.4058s
Total: 0.4501s High Level: 0.4129s
Total: 0.4495s High Level: 0.4138s
Total: 0.4498s High Level: 0.4130s
Total: 0.4501s High Level: 0.4136s
Total: 0.4396s High Level: 0.4034s
Total: 0.4496s High Level: 0.4128s
Total: 0.4497s High Level: 0.4136s
Total: 0.4420s High Level: 0.4084s
Total: 0.0061s High Level: 0.0034s
Total: 0.4348s High Level: 0.0001s
Total: 0.0030s High Level: 0.0006s
|
|
一派護法 十九級 |
【将右LED灯短路后测得的数据】
Total: 0.0087s High Level: 0.0000s
Total: 0.0001s High Level: 0.0000s
Total: 0.0008s High Level: 0.0008s
Total: 0.0001s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0681s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0681s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.6003s High Level: 0.2991s
Total: 0.0000s High Level: 0.0000s
Total: 0.1081s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0026s High Level: 0.0026s
Total: 0.0000s High Level: 0.0000s
Total: 0.0031s High Level: 0.0031s
Total: 0.0000s High Level: 0.0000s
Total: 0.0058s High Level: 0.0058s
|
|
一派護法 十九級 |
【将两个LED灯都短路后测得的数据】
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0024s
Total: 0.0002s High Level: 0.0004s
Total: 0.0000s High Level: 0.0000s
Total: 0.0001s High Level: 0.0003s
Total: 0.0065s High Level: 0.0065s
Total: 0.0000s High Level: 0.0011s
Total: 0.0000s High Level: 0.0000s
Total: 0.0001s High Level: 0.0001s
Total: 0.0025s High Level: 0.0025s
Total: 0.0037s High Level: 0.0037s
Total: 0.0002s High Level: 0.0002s
Total: 0.0000s High Level: 0.0004s
Total: 0.0001s High Level: 0.0000s
Total: 0.0067s High Level: 0.0067s
Total: 0.0002s High Level: 0.0004s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0002s High Level: 0.0002s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0007s
Total: 0.0066s High Level: 0.0066s
Total: 0.0002s High Level: 0.0002s
Total: 0.0000s High Level: 0.0002s
Total: 0.0001s High Level: 0.0001s
Total: 0.0004s High Level: 0.0004s
Total: 0.0000s High Level: 0.0011s
Total: 0.0000s High Level: 0.0001s
Total: 0.0000s High Level: 0.0000s
Total: 0.0068s High Level: 0.0068s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0007s
Total: 0.0064s High Level: 0.0064s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0001s High Level: 0.0001s
Total: 0.0032s High Level: 0.0032s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0002s High Level: 0.0004s
Total: 0.0067s High Level: 0.0067s
Total: 0.0002s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0002s High Level: 0.0002s
Total: 0.0056s High Level: 0.0056s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0056s High Level: 0.0017s
Total: 0.0089s High Level: 0.0089s
Total: 0.0000s High Level: 0.0008s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0064s High Level: 0.0064s
Total: 0.0002s High Level: 0.0002s
Total: 0.0000s High Level: 0.0000s
Total: 0.0001s High Level: 0.0001s
Total: 0.0001s High Level: 0.0000s
Total: 0.0002s High Level: 0.0002s
Total: 0.0000s High Level: 0.0000s
Total: 0.0002s High Level: 0.0002s
Total: 0.0065s High Level: 0.0065s
Total: 0.0001s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0001s High Level: 0.0001s
Total: 0.0001s High Level: 0.0003s
Total: 0.0000s High Level: 0.0000s
Total: 0.0002s High Level: 0.0002s
Total: 0.0066s High Level: 0.0066s
Total: 0.0002s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0060s High Level: 0.0060s
Total: 0.0002s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0066s High Level: 0.0066s
Total: 0.0002s High Level: 0.0002s
Total: 0.0048s High Level: 0.0016s
Total: 0.0017s High Level: 0.0017s
Total: 0.0080s High Level: 0.0080s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0002s High Level: 0.0002s
Total: 0.0069s High Level: 0.0069s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0072s High Level: 0.0072s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0002s
Total: 0.0002s High Level: 0.0002s
Total: 0.0055s High Level: 0.0055s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0060s High Level: 0.0060s
Total: 0.0001s High Level: 0.0001s
Total: 0.0000s High Level: 0.0000s
Total: 0.0004s High Level: 0.0004s
Total: 0.0082s High Level: 0.0082s
Total: 0.0001s High Level: 0.0003s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0002s High Level: 0.0004s
Total: 0.0000s High Level: 0.0000s
Total: 0.0002s High Level: 0.0002s
Total: 0.0077s High Level: 0.0077s
Total: 0.0002s High Level: 0.0002s
Total: 0.0000s High Level: 0.0000s
Total: 0.0000s High Level: 0.0000s
Total: 0.0067s High Level: 0.0067s
Total: 0.0000s High Level: 0.0000s
|
|
一派護法 十九級 |
把多谐振荡器输出的信号接到74LS193计数器的时钟信号引脚上可以看到,计数值跳变得很不规则。有时候是加1,有时却加的是2,甚至3。因此,多谐振荡器不能用来作为数字电路的时钟源。
|
|
一派護法 十九級 |
STM32单片机内部有斯密特触发器来过滤外部的输入,所以多谐振荡器的噪声体现不明显。然而在普通的数字74系列芯片中可没有这样的过滤器,所以都无法正常工作。
|
|
|
|

